济南恒捷热线:0531-69959809
济南恒捷热线:0531-69959809

济南恒捷自动化设备有限公司
联系人:王经理
咨询热线:15550026809
咨询热线:0531-69959809
企业传真:0531-69959809
企业QQ:1736851033
企业邮箱:1736851033@qq.com
工厂地址:山东省济南市历城区菜园工业园
办公地址:山东省济南市世纪大道15612号
网址:www.hjhanjie.com


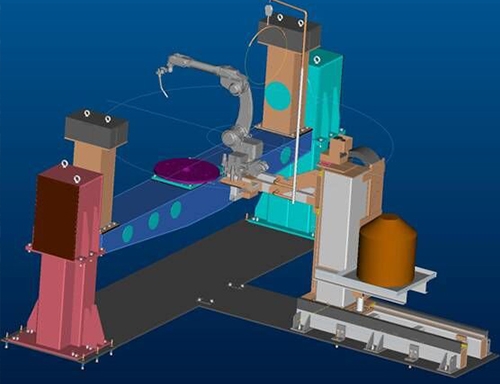
u 系统构成为:一台机器人+2向行走机构+1台2轴变位器。其具体操作流程如下:
Ø 操作者在变位器外侧将需要焊接的工件装在工位手动夹具上。
Ø 操作者退出并按启动按钮,机器人开始焊接。
Ø 当机器人完成工位工件的焊接,操作者将工位上焊好的工件卸下,将需要焊接的工件装夹在夹具上。装夹完成后再按启动钮。
Ø 如此循环往复工作。
Ø 使用工件:40塔机上下支座。
特别说明:
² 工件提前点焊好后上工装机器人焊接。点焊点位置要基本固定,焊点焊角高小于3mm。组对间隙应小于2mm,当间隙大于2mm时应该手工补焊,补焊焊缝均匀。
² 焊接产品中筋板的间距应满足机器人焊接空间。
² 机器人无法焊接的位置由手工焊接。
² 工件支腿可二次装夹焊接,部分焊缝采用角焊缝,不能实现船型焊。
² 设备生产焊接效率:以山东某用户产品为例,机器人焊接3小时/件,手工焊接9小时/件。
1. 主要设计构成及性能参数
1.1设备构成
序号 | 名 称 | 型号及规格 | 数量(套) | 备 注 | |
1 | 机器人系统 | 机器人本体 | TM-1800 | 1 | Panasonic |
机器人控制柜 | 1 | panasonic | |||
2 | 外部轴电机 | APU01112(1Kw) | 1 | Panasonic | |
3 | 外部轴电机 | APU01113(2Kw) | 1 | Panasonic | |
4 | 外部轴电机 | APU01114(3.5Kw) | 2 | Panasonic | |
5 | 4轴外部轴控制器 | 1 | Panasonic | ||
6 | 焊接电源 | YD-500GR3 | 1 | Panasonic | |
6 | 中板软件 | 1 | Panasonic | ||
7 | 接触传感器 | 1 | Panasonic | ||
8 | 接触传感器专用送丝机 | 1 | Panasonic | ||
9 | 变压器 | TRANS-30 | 1 | Panasonic | |
10 | 电弧传感器 | 1 | Panasonic | ||
11 | 空冷传感焊枪 | 1 | Panasonic | ||
12 | 焊接夹具 | 1 | Panasonic | ||
13 | 双手启动按钮盒 | 1 | Panasonic | ||
14 | 机器人二轴行走机构 | 1 | Panasonic | ||
15 | 底座及支架 | 1 | Panasonic | ||
16 | 协调功能 | 1 | Panasonic | ||
1.2 机器人相关设备技术参数
l TM-1800机器人本体技术规格:(见下表)
机 型 | TM-1800 | ||
构 造 | 6轴独立关节型 | ||
自 由 度 | 6轴 | ||
驱动方式 | AC伺服电机 | ||
大可搬质量 | 8kg | ||
重复定位精度 | ±0.1mm | ||
动作范围 | 大到达距离 | 1796mm | |
小到达距离 | 472mm
| ||
前后动作范围 | 1323mm | ||
动作速度 | 手臂 | RT轴 | 2.97rad/s(170°/s) |
UA轴 | 2.97rad/s(170°/s) | ||
FA轴 | 3.05rad/s(175°/s) | ||
腕 | RW轴 | 6.28rad/s(360°/s) | |
BW轴 | 6.11rad/s(350°/s) | ||
TW轴 | 9.42rad/s(540°/s) | ||
位置检测器 | 电子式 | ||
总驱动功率 | 4250W | ||
制动 | 全轴制动 | ||
动作限位保护 | 1、软限位保护;2、机械式停止器(基本3轴) | ||
接地 | D种接地以上的机器人专用接地方式 | ||
涂装色 | RT:N3.5;其他:N7.5 | ||
安装姿势 | 水平 天吊 | ||
周围温度、湿度 | 0°C--45°C;20%RH—90%RH;不结霜 | ||
重量 | 约185kg | ||
l 机器人控制器技术规格:(见下表)
名称 | TA-G2 |
构造 | 箱形密封式 |
外形尺寸(mm) | (W)420×(D)600×(H)530 |
大概质量 | 约48kg(含示教器、电缆) |
冷却方式 | 机器人控制部:间接风冷(外界空气设备的内部的循环方式) |
内存容量 | 40000点 |
位置控制方式 | 软件伺服方式 |
串行I/F | TP:2个PCMCI卡插口PS/2 |
控制轴数 | 同时6轴(多27轴) |
输入输出信号 | 专用信号:输入6 输出8 通用信号:输入40 输出40 大输入输出信号:输入504 输出504 |
输入电源 | 3相AC200/220V±10%、6KVA |
适用焊接电源 | YD-350/500GR3 YD-350/500GL3 YD-350GE2 YD-350GB2 YC-300BP2 YC-300BZ3 |
1.3 焊接电源
唐山松下产业机器有限公司(简称PWST)成立于1994年8月,是由日本Panasonic及唐山开元电器有限公司共同投资兴建的中日合资企业。公司采用日本Panasonic先进的管理和技术,使用世界的制造、调试及检测设备,生产商标为“Panasonic”的各种CO2/MAG/MIG气体保护焊机,交/直流氩弧焊机、切割机、电阻焊机、焊接机器人及相关产品,其中25%出口。1996年以来,唐山松下的销售额一直位居中国电焊机行业,被日本Panasonic评价为松下在华佳合资企业,作为目前国内大的焊接设备制造企业,唐山松下以科技和优良的品质赢得了用户的广泛赞誉,Panasonic电焊机成为受欢迎的品牌。
唐山松下的产品,已经成功的应用于船舶、机车车辆、汽车、工程机械、摩托车等各个领域。自1995年投入生产以来,已经向用户累计提供各种焊机达到20万台套,其中CO2气体保护焊机占总量的60%以上。
在我们的产品家族中,选择了采用日本新技术,适应中国用户使用特点的机型:YD-500GR3机型为机器人进行配套,以实现机器人焊接和自动焊接等复杂焊接过程的多种扩展机能。
技术参数如下表:
名 称 | 规 格 |
焊接电源型号 | YD-500GR3 |
输入电源 | 3相AC380V±10% 50Hz |
额定输入容量 | 23.3KVA、22.4KW |
额定输出电流 | 500A |
额定输出电压 | 39V |
输出电流范围 | 60-550A(电阻负载输出能力) |
输出电压范围 | 17-41.5V(电阻负载输出能力) |
额定负载持续率 | |
外形尺寸 | (W) 380mm*(D) 550mm*(H) 815mm |
质 量 | 60kg |
1.4变位机:
机器人工作站内的双持持双轴变位机用于工件焊接变位。变位机的传动采用伺服电机-精密摆线减速机-齿轮副-交叉滚轴承的驱动方式。变位机采用的是panasonic机器人外部轴电机,由机器人控制柜统一控制,焊接过程中,变位器与机器人协调运动,可将任何一段焊缝转到合适的焊接位置,由机器人带动焊枪以佳的焊接姿态进行焊接。
其主要技术参数如下:
额定负载(竖直翻转) | 2T(双持) |
工作台翻转变位机伺服电机额定功率 | 3.5kW |
翻转轴回转范围 | ±360° |
额定负载(水平翻转) | 2T(单持) |
工作台翻转变位机伺服电机额定功率 | 2kW |
翻转轴回转范围 | ±360° |
重复定位精度 | ±0.3mm(R=250mm处) |
1.5机器人行走装置:
机器人工作站内的机器人行走装置用于在焊接过程中实现机器人自动移动的装置。机器人Y向行走装置的传动采用伺服电机-精密减速机-齿轮齿条的方式,Z向行走装置的传动采用伺服电机-齿轮副-滚柱丝杠的方式,承载支撑采用直线导轨-滑座。机器人行走装置采用panasonic机器人外部轴电机,由机器人控制柜统一控制,焊接过程中,机器人行走装置与机器人协调运动,可将任何一段焊缝转到合适的焊接位置,由机器人带动焊枪以佳的焊接姿态进行焊接。
其主要技术参数如下:
Y轴伺服电机额定功率 | 1.0kw |
Y轴大行走长度 | 1500mm |
重复定位精度 | ±0.4mm |
Z轴伺服电机额定功率 | 3.5kw |
Z轴大行走长度 | 1000mm |
重复定位精度 | ±0.4mm |